近日,我校光電學院徐時清教授團隊與機電學院王斌銳教授課題組合作,在基于納米光電材料的軟體機器人研究中取得新進展。該成果以“Light-driven soft actuator based on graphene and WSe2 nanosheets composite for multimodal motion and remote manipulation”為題發表在由清華大學創辦的高水平國際學術期刊《Nano Research》(SCI一區)上。第一作者為光電學院2020級碩士研究生蘇澤文,指導教師為白功勛研究員。
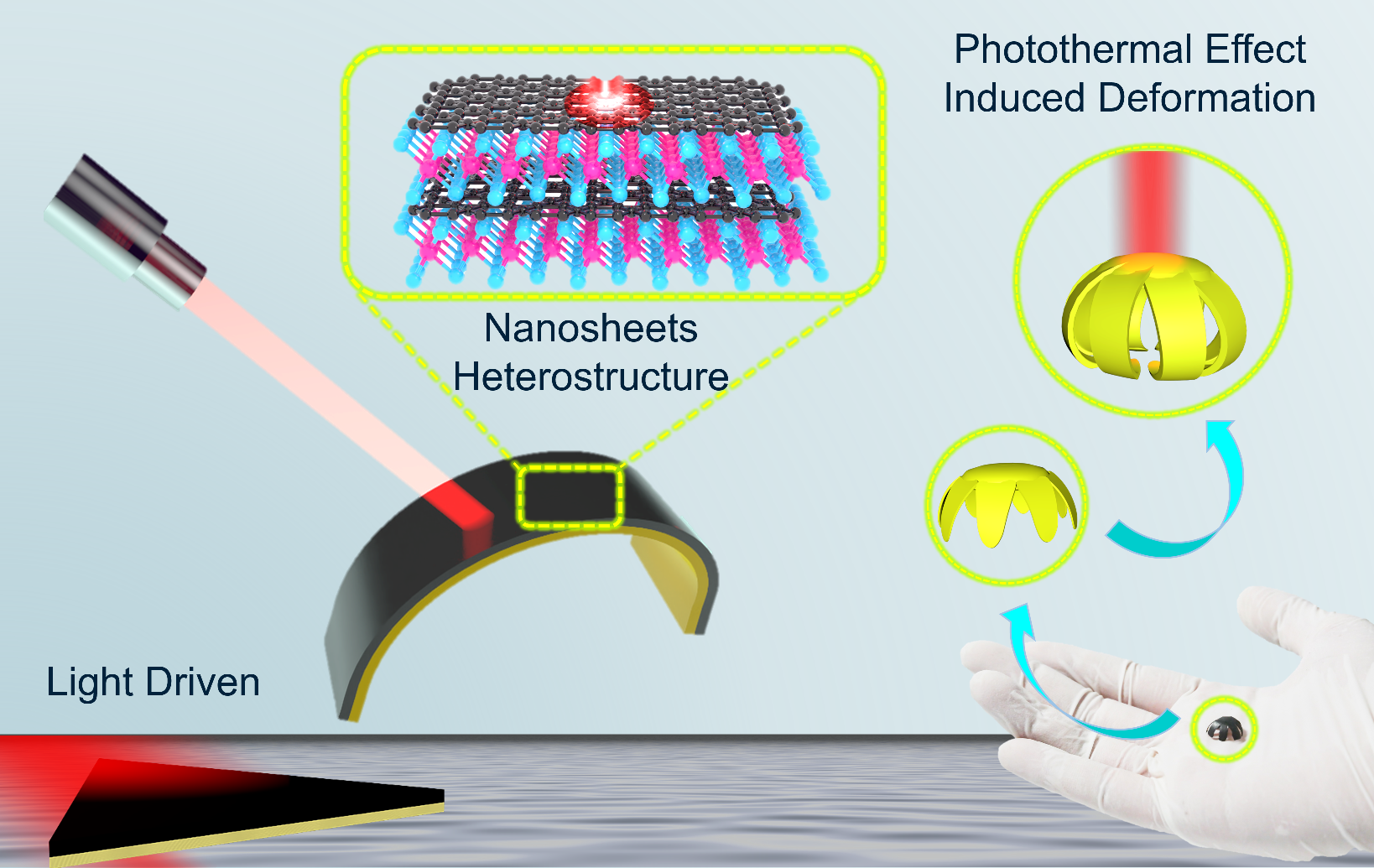
軟體致動器憑借其靈活性和環境適應性在軟體機器人、人造肌肉、可穿戴設備等領域中展現出了巨大的應用前景,光驅動能夠打破空間限制實現遠程非接觸操控,因此設計能夠適應多種環境的軟體致動器對于實際應用具有重要意義。團隊成功開發了基于納米片異質結的近紅外激光驅動軟體致動器,展示了能適應不同環境、具有多種運動模式的軟體機器人,以及能夠實現抓取和長距離運送的柔性抓手。
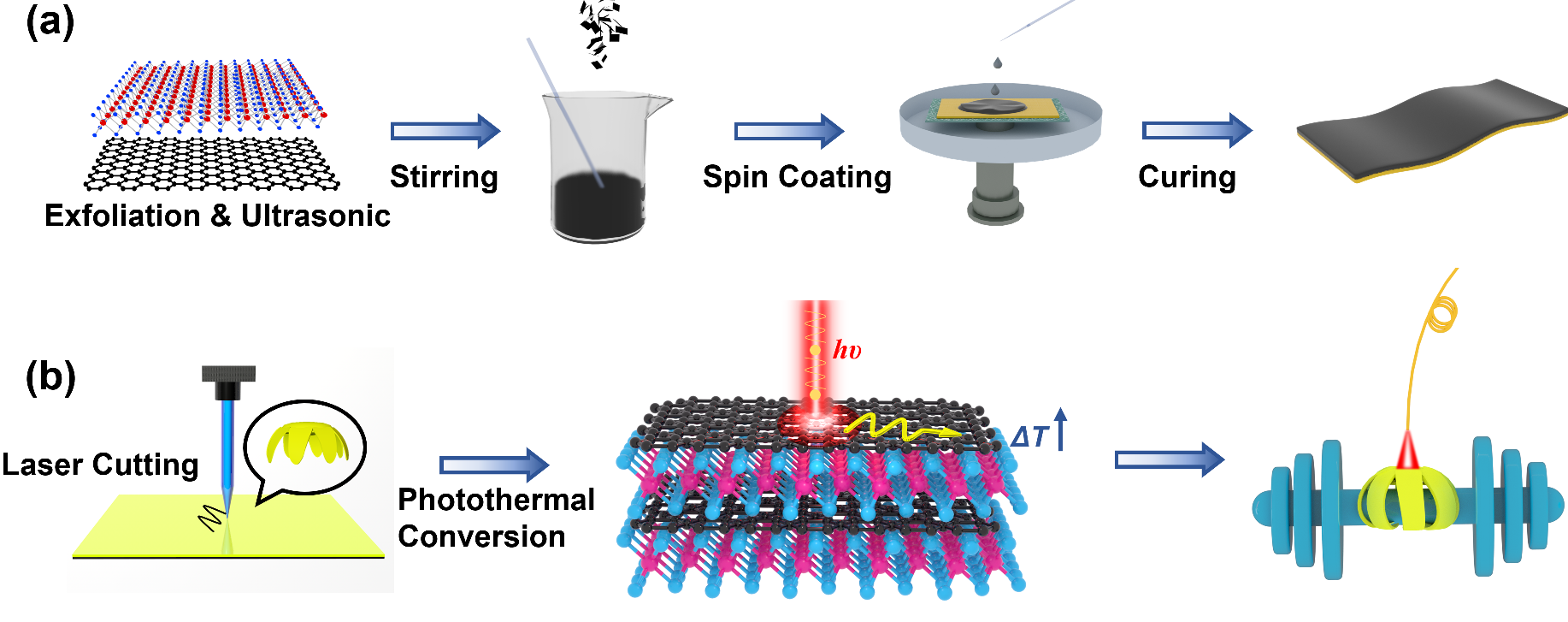
該研究通過制備二硒化鎢與石墨烯的納米片異質結,避免了石墨烯在聚二甲基硅氧烷中的團聚效應,提高了近紅外范圍的光吸收率與近紅外激光驅動下的局域溫度。團隊提出了結合高能分散法、旋涂法與激光切割實現具備環境適應性的軟體機器人大規模設計制造策略,對軟體致動器的形變和遠程操控性能進行了表征,通過實驗與多物理場仿真對軟體致動器的形變能力進行了表征驗證。實現了近紅外激光照射下軟體機器人在水面上靈活高速運動。受自然界中尺蠖的運動姿態啟發,團隊設計出雙模運動的仿生軟體機器人并分析其運動過程的受力變化。作為實際應用,柔性抓手能夠在近紅外脈沖激光作用下抓握超過自重四倍的物體,將柔性抓手裝載到導軌上能夠實現抓取、提升和快速大范圍運送物體,克服空間型致動器運動速度慢、設計復雜、需要持續刺激的缺陷。
該研究結果拓展了用于軟體致動器的光熱材料的選擇范圍,彌合了形狀設計與可編程運動模式之間的差距,通過智能機器人設計和光纖的結合,在光熱治療和復雜環境檢測等領域具有廣闊的應用前景,并在工業、醫療和傳感領域顯示出巨大的應用潛力。
此項工作得到了國家自然科學基金面上項目(62175225)、浙江省自然科學基金重點項目(LZ21E020004)和浙江省萬人計劃基金(ZJWR0308004)的支持。








